[00001791]仿生壁虎机器人干性黏附材料的制备
技术详细介绍
该项目为国家863和973项目的科研成果,针对需在危险、复杂环境下进行作业需求,以壁虎脚掌黏附及爬壁运动为生物学模型,开发仿生干性黏附材料,并研发微型、轻质、静音的仿生爬壁机器人系统,实现在三维空间表面进行无障碍运动的功能,为国家安全和特殊环境作业提供装备载体和技术保障。 项目已实现建立基于仿生干性黏附刚毛阵列黏附材料的制备方法,解决微型仿生爬壁机器人仿生粘附功能,并研制出微型仿生爬壁机器人样机,技术达到国际领先水平。
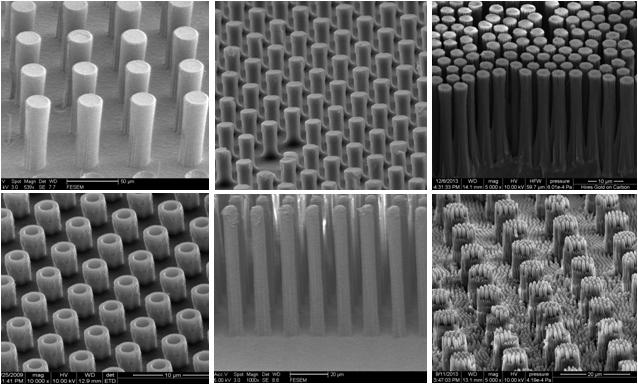
主要内容包括: 1。以微机电系统加工工艺(MEMS工艺)为基础,建立了硅基微米结构阵列工艺流程,结合软模板复形法和胶体微球印刷技术,发展了一系列制备高分子材料仿生微纳刚毛阵列结构的方法。 2。采用二次塑形技术,制备出了具有不同顶端形貌的仿生微米刚毛阵列结构。 3。纳米管基仿生黏附阵列的制备及其黏附性能调节。 4。 磁性粒子复合仿生微米柱阵列的构筑及其黏附效应的调节。 参数: 宏观黏附力的最大切向黏附力为5N/cm2,最大法向黏附力为4。5N/cm2。利用该结构材料制备的轮式履带和轮式拨片,实现了履带式爬壁机构和拨片式爬壁机构在不同表面的垂直爬行。
仿生材料技术作为世界各国优先研究的新领域,对人类的自身发展具有重大贡献。本项目技术和产品可应用于航天航空、工业生产、交通运输、疾病检测、制药工程等诸多领域。
主要内容包括: 1。以微机电系统加工工艺(MEMS工艺)为基础,建立了硅基微米结构阵列工艺流程,结合软模板复形法和胶体微球印刷技术,发展了一系列制备高分子材料仿生微纳刚毛阵列结构的方法。 2。采用二次塑形技术,制备出了具有不同顶端形貌的仿生微米刚毛阵列结构。 3。纳米管基仿生黏附阵列的制备及其黏附性能调节。 4。 磁性粒子复合仿生微米柱阵列的构筑及其黏附效应的调节。 参数: 宏观黏附力的最大切向黏附力为5N/cm2,最大法向黏附力为4。5N/cm2。利用该结构材料制备的轮式履带和轮式拨片,实现了履带式爬壁机构和拨片式爬壁机构在不同表面的垂直爬行。
仿生材料技术作为世界各国优先研究的新领域,对人类的自身发展具有重大贡献。本项目技术和产品可应用于航天航空、工业生产、交通运输、疾病检测、制药工程等诸多领域。

