[00102420]微创全膝关节置换手术机器人
联系人:
所在地:
- 服务承诺
- 产权明晰
-
资料保密
对所交付的所有资料进行保密
- 如实描述
技术详细介绍
项目简介: 项目针对术前、术中、术后全周期的 MIS-TKA 机器人综合解决 方案,突破柔顺 7 自由度机械臂与精细操作 2 自由度末端执行器,个 性化虚拟导板以及安全手术操控技术,基于图像配准的增强现实手术 导航技术,术中下肢力线定量检测与修正、以及个性化术后评估技术; 研制出具有术前规划、术中导航与机器人操控、术后评估、以及安全 保障的专科型 MIS-TKA 机器人样机系统,建立 MIS-TKA 机器人手 术流程规范与安全、有效性评估体系。
项目特色: 膝关节损伤是骨科学的主要组成部分,且由于其周围毗邻重要神 经、血管,不恰当的手术操作往往会导致严重后果。微创全膝关节置 换技术手术创伤小,术后恢复快,深受患者好评。但该技术严重限制了手术切口,手术视野小、操作空间窄、骨性标志显露差对医生提出 了更高的要求。本项目从微创全膝关节置换手术外科临床出发,针对 术前、术中、术后三个阶段提出智能化、机器人化手术方案,将微创 精准 TKA 手术提升到智能化水平,推动 TKA 机器人手术技术、TKA 导航技术、TKA 术前规划和术后评估技术、以及智能化手术系统集 成技术的进一步发展,为后续临床验证、产品化奠定坚实的技术基础。
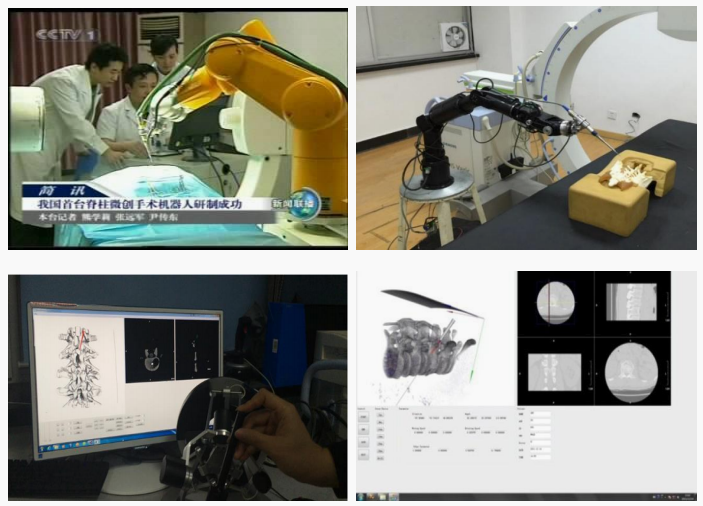
已取得的成果: 已成功研制出脊柱微创手术机器人系统,并开展临床试验(如下图)。

