[00047326]一种继电器节能结构
联系人: 钟志刚
所在地: 江苏苏州市
- 服务承诺
- 产权明晰
-
资料保密
对所交付的所有资料进行保密
- 如实描述
技术详细介绍
项目简介:
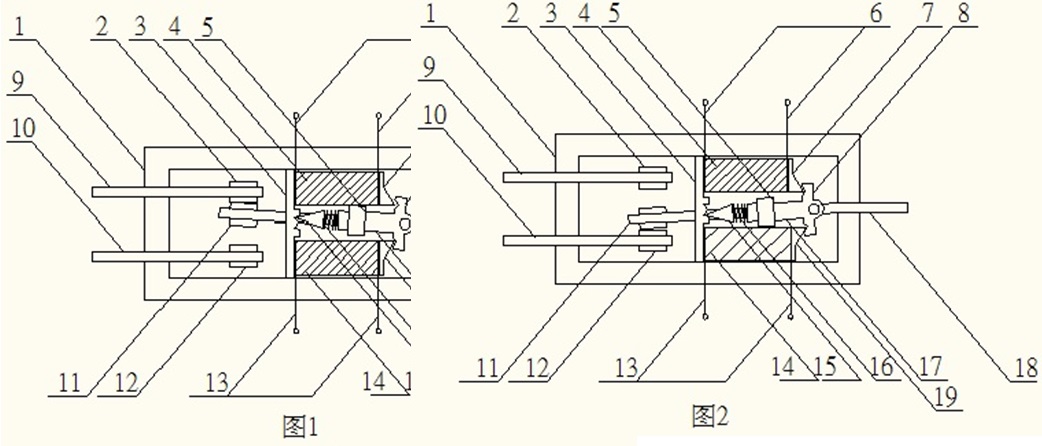
本发明涉及的一种继电器节能结构,包括以下部分:弹性摆臂、限位结构、驱动结构、控制电路、可移动触片、固定触片,所述弹性摆臂在驱动结构的推动下,在限位结构的两极间移动,带动可移动触片在固定触片间移动,并依靠自身弹力锁定位置,改变并保持可移动触片与不同位置固定触片间的接触,实现电路的开闭控制。
项目核心创新点:
1、本发明不依赖控制电路做功,利用弹性摆臂与限位结构的定位功能,通过控制电路在被控制电路开闭转换时的短时运行,实现被控制电路的开闭转换和转换后的长时间开闭控制功能,控制电路运行时间短、功耗低、结构可靠,在机械、电子、家电控制和自动化领域的应用范围非常广泛。
2、利用弹性摆臂与限位结构的定位功能,相比现有的电磁继电器、固体继电器等继电器设备,控制电路做功时间短、能耗低、发热量极小,使用寿命长。
3、利用杠杆原理将驱动结构和推动臂的较小动作,转换为弹性摆臂和可移动触片较大的运动,有利于缩小控制电路与驱动结构的尺寸、功率和能耗。
项目详细用途:
利用弹性摆臂与限位结构的定位功能,通过控制电路的短时运行,实现被控制电路的长时间开闭控制,控制电路运行时间短、功耗低、结构可靠,在机械、电子、家电控制和自动化领域的应用范围非常广泛。
预期效益说明:
本发明不依赖控制电路持续做功,利用弹性摆臂与限位结构的定位功能,通过控制电路在被控制电路开闭转换时的短时运行,实现被控制电路的开闭转换和转换后的长时间开闭控制,控制电路运行时间短、功耗低、结构可靠,在机械、电子、家电控制和自动化领域的应用范围非常广泛。

